【儀表網 研發快訊】近日,武漢光電國家研究中心熊偉教授團隊提出了一種新型光驅動晶格軟體微型機器人。研究團隊受自然界微生物多樣運動方式的啟發,結合激光微納制造與水凝膠材料特性,設計出具備晶格結構的軟體微型機器人,能夠在光場調控下實現蠕動、旋轉和跳躍等多模態仿生運動。與傳統實心結構相比,該機器人不僅能量利用效率顯著提升,而且運動速度大幅增加,在復雜環境下展現出良好的柔性和適應性。研究成果以“Light-driven lattice soft microrobot with multimodal locomotion”為題發表在Nature Communications。
軟體微機器人因其小尺寸和柔性驅動特性,在生物醫學、仿生學和精密微機械等領域具有廣闊應用前景。然而,現有微型機器人依賴的水凝膠材料在響應速度和變形能力方面存在不足,運動模式多為預設的周期性形變,難以適應復雜多變的環境。這些問題嚴重制約了軟體微型機器人的發展。
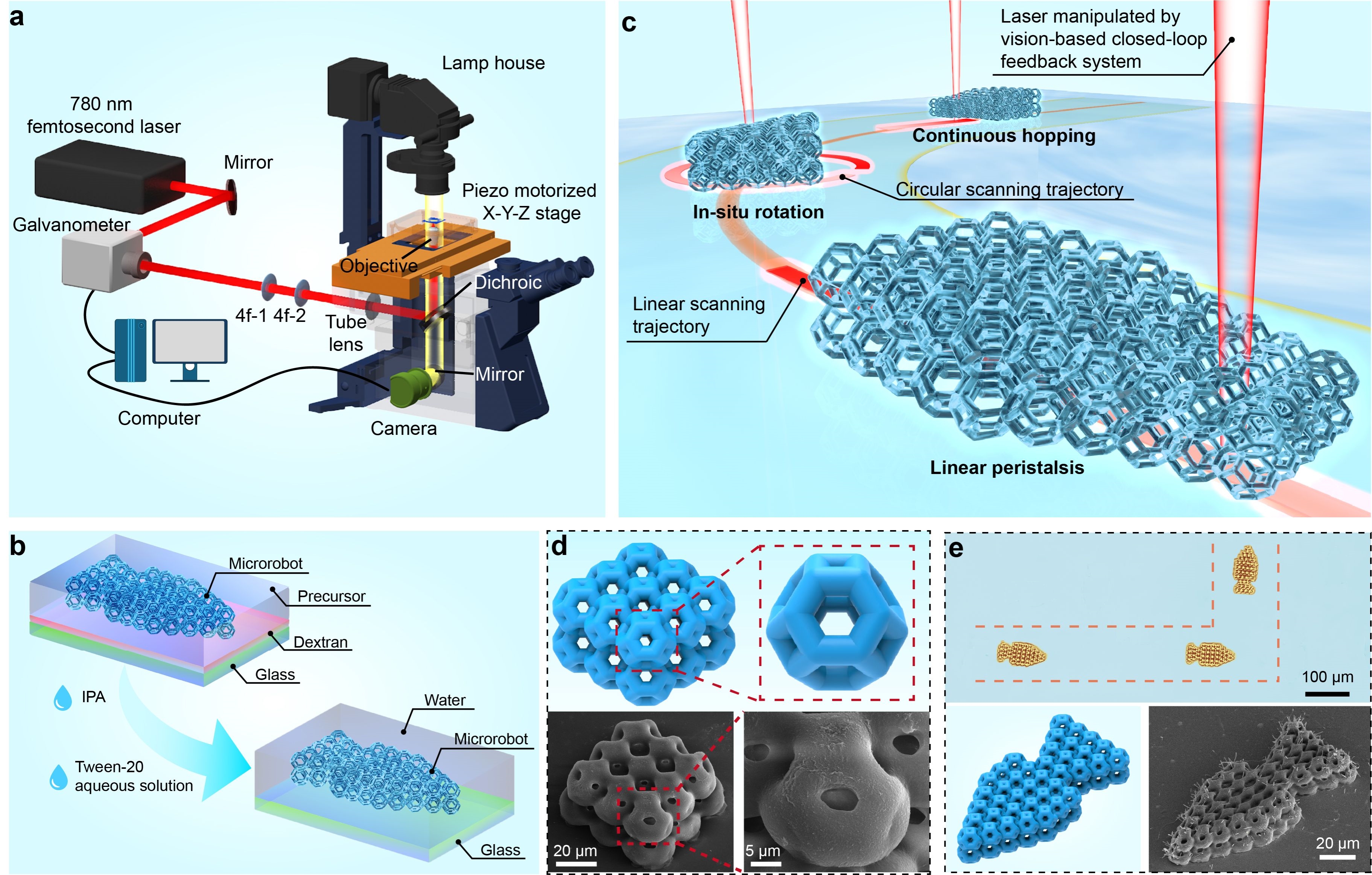
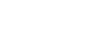
圖1.晶格軟體微型機器人設計與制備流程
針對上述難題,熊偉教授團隊利用飛秒激光微納增材制造技術,在溫度響應型聚合物中引入單壁碳納米管,設計出一種截角八面體晶格結構的微型機器人。該設計顯著降低了材料密度,增大了比表面積,使機器人在光照下能快速產生局部形變。研究表明,晶格結構使機器人在相同條件下僅需實心結構六分之一的能量,即可達到三倍的運動速度,其旋轉速度高達每秒29.38度,比已有報道提升近30倍;在蠕動模式下,速度可達15.15μm/s。
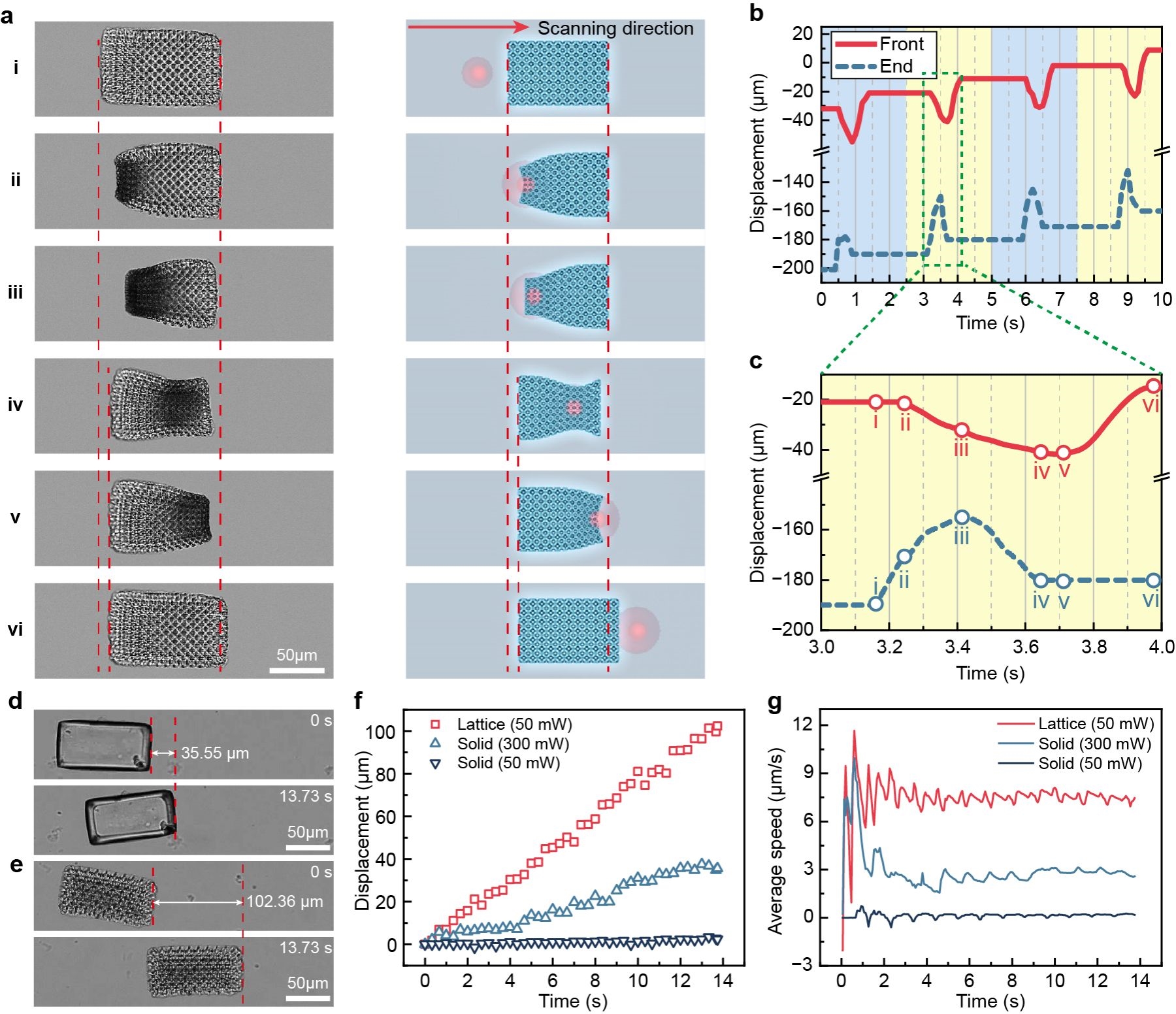
圖2.晶格微型機器人在蠕動模式下的運動表現
得益于晶格結構與光場調控的結合,機器人能夠實現多模態運動:在激光掃描驅動下產生蠕動前進;通過環形光軌實現原地旋轉;在高功率激光作用下完成連續跳躍。更進一步,研究團隊引入基于計算機視覺的閉環反饋控制系統,使機器人能夠實時修正姿態偏差并沿設定路徑自主導航。在實驗中,研究人員成功演示了機器人在“星形”和“迷宮”軌跡上的自主運動,顯示出精確的可編程控制潛力。
圖3. 晶格微型機器人的手動控制運動與閉環反饋控制運動
武漢光電國家研究中心博士研究生張銘鐸和博士后劉耘呈為論文共同第一作者,熊偉教授為通訊作者。該研究得到了國家重點研發計劃、國家自然科學基金、中央高校基本業務費以及光谷實驗室創新研究項目的資助。




















所有評論僅代表網友意見,與本站立場無關。